

آشنایی با یاتاقان مغناطیسی
1730 بازدید
یاتاقان های مغناطیسی نسل جدیدی از انواع یاتاقان ها هستند که اساس کار آن ها معلق نگه داشتن قسمت دوار یا روتور در هوا هستند. بنابراین نبود اصطکاک در این حالت باعث می شود که بدون محدودیت در سرعت چرخش بتوان از آن ها استفاده کرد. در ویدیوی زیر می توانید نمایشی از این نوع یاتاقان و اجزای آن را مشاهده کنید
معرفی یاتاقان مغناطیسی
یاتاقان مغناطیسی یک سیستم یاتاقان بدون روغن است که از نیروهای الکترومغناطیسی برای حفظ موقعیت نسبی یک مجموعه دوار (روتور) نسبت به یک جزء ثابت (استاتور) استفاده می کند. همچنین یک سیستم کنترل الکترونیکی پیشرفته این نیروهای الکترومغناطیسی را متناسی با نیروهای تولید شده از عملکرد ماشین تنظیم می کند.
یاتاقان مغناطیسی شعاعی روتور را با استفاده از عموماً چهار آهنربای الکترومغناطیسی که هر کدام از یک جزء استاتور و یک جزء روتور تشکیل شده است، در موقعیت مناسب خود قرار می دهد. آهنرباهای الکترومغناطیسی که روبه روی یکدیگر قرار گرفته اند، نیروی در جهت خلاف یکدیگر به روتور وارد می کنند. هنگامی که یک نیروی خارجی باعث تغییر موقعیت روتور می شود، حرکت روتور توسط سنسورهای موقعیت مشخص می شود. سپس سیستم کنترل الکترونیکی با تنظیم جریان عبوری از آهنرباهای الکتریکی مربوطه، نیرویی را به روتور وارد کرده و آن را به موقعیت اصلی خود باز می گرداند. همچنین یاتاقان مغناطیسی محوری روتور را به صورت محوری در موقعیت خود نگه میدارد.
یاتاقان های مغناطیسی به طور کلی به دو دسته ی فعال و غیرفعال تقسیم می شوند، اگرچه بلبرینگ های مغناطیسی فعال نسبت به غیرفعال ترجیح داده میشوند. در این یاتاقان ها چون روتور به کمک نیروهای مغناطیسی در حالت شناور قرار می گیرد، اصطکاک و در نتیجه تولید گرمای بیش از حد از بین رفته و همچنین سایش و آسیب مکانیکی وجود نخواهد داشت. امروزه یاتاقانهای مغناطیسی فعال و غیرفعال در بسیاری از موارد با یاتاقانهای الکترودینامیکی جدید جایگزین شدهاند که دارای حرکت چرخشی بهتر هستند. هنگام استفاده از یاتاقان های مغناطیسی محدودیتی برای سرعت چرخش وجود ندارد، زیرا اصطکاک وجود ندارد. اصطکاک کمتر به معنای اتلاف انرژی کمتر و بازده کلی بیشتر است. اولین حق ثبت اختراع مربوط به تعلیق مغناطیسی عناصر دوار در دهه 1940 ارائه شد. با این حال، اولین کاربردهای گسترده از آنها تا دهه هفتاد اتفاق نیفتاد.
کاربردهای بلبرینگ مغناطیسی
یاتاقان های مغناطیسی در کاربردهای صنعتی مانند تولید برق، پالایش نفت، ماشین ابزار و پمپ ها، دمنده ها، کمپرسورها، موتورها، توربین های گازی و … مورد استفاده قرار می گیرند. همچنین در سانتریفیوژ نوع Zippe، برای غنیسازی اورانیوم و در پمپهای توربومولکولی و مکانهایی که یاتاقانهای روغنکاری شده منبع آلودگی هستند، استفاده میشوند.
مزایای بلبرینگ مغناطیسی
- ایمنی و قابلیت اطمینان بالا
- تاثیر مثبت محیط زیستی با حذف روغن و آلایندههای مرتبط با آن
- مصرف انرژی کم
- نویز کمتر
- تعمیر و نگهداری کمتر و صرفهی اقتصادی بیشتر
- نبود اصطکاک و درنتیجه افزایش عمر قطعات
- نبود محدودیت برای سرعت دوران روتور
انواع یاتاقان های مغناطیسی
- آهنرباهای دائمی (Permanent magnets) که با نام غیرفعال (Passive) نیز شناخته میشوند.
- آهنرباهای فعال (Active magnets)
- رزونانس ال سی (LC resonant)
- القایی (Induction)
- هدایتی (Conduction)
- دیامغناطیسی (Diamagnetic)
- ابررسانا (Superconducting)
- مغناطیسی هیدرودینامیکی (Magnetohydrodynamic)
رایج ترین آنها دو نوع مختلف یاتاقان مغناطیسی است که عبارتند از:
غیرفعال – با آهنرباهای دائمی فعال – با آهنرباهای الکتریکی و یک سیستم کنترلی
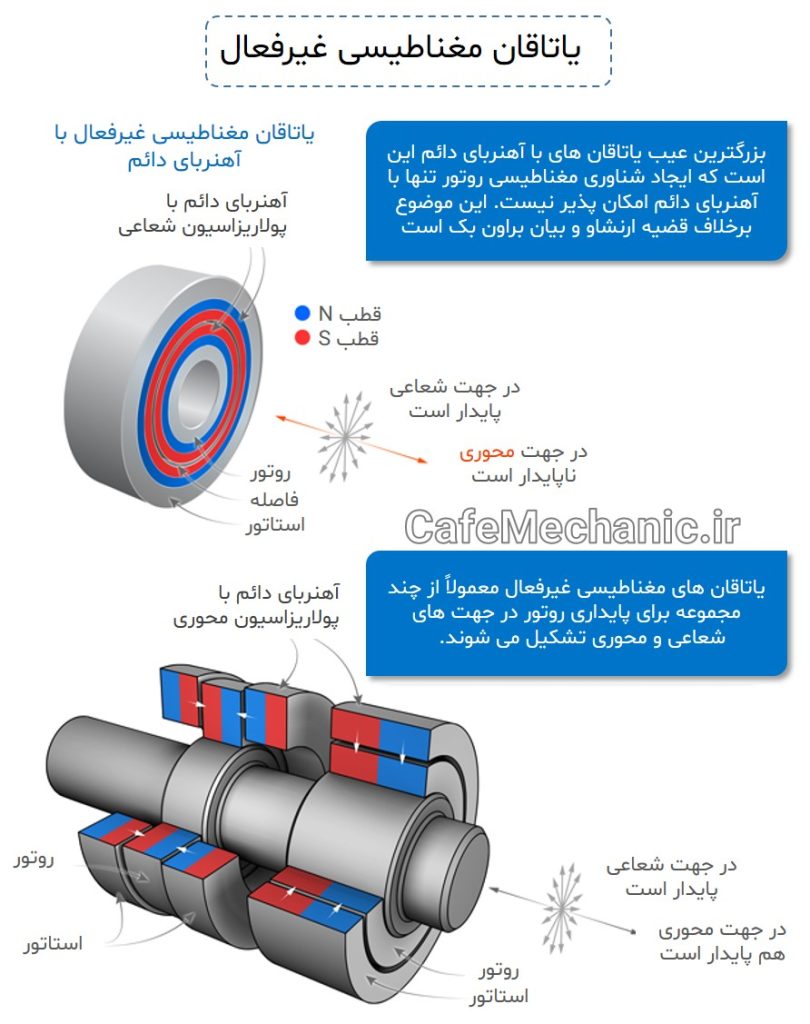
یاتاقان مغناطیسی غیرفعال (Passive)
اولین نوع یاتاقان های مغناطیسی از آهنرباهای دائمی استفاده می کنند. به دلیل عدم توانایی تنظیم نیروی مغناطیسی، این بلبرینگ ها باید با دقت بالایی طراحی و ساخته شوند. با این حال، چیزی به نام یاتاقان مغناطیسی کامل و بی نقص وجود ندارد و رسیدن به پایداری میدان الکترواستاتیک مطلق غیرممکن است. عیب اصلی یاتاقان های آهنربای دائمی این است که ایجاد یک شناوری مغناطیسی برای روتور فقط با استفاده از آهنرباهای دائمی غیرممکن است. این محدودیت نتیجه موارد زیر است:
قضیه ارنشاو(Earnshaw’s theorem): موقعیت تعادل عنصر فعال در میدان نیروی استاتیک ناپایدار است اگر نیرو و فاصله با قانون مربع معکوس مرتبط باشند.
عبارات براون بک (Brownback’s statements): پایداری شناوری یک جسم فیزیکی در میدان مغناطیسی ثابت در صورتی امکان پذیر است که تراوایی مغناطیسی آن ماده کمتر از تراوایی مغناطیسی محیط باشد.
این قوانین منجر به این واقعیت می شود که در یک میدان مغناطیسی ثابت (در شرایط عادی) فقط اجسام فیزیکی ساخته شده از مواد دیامغناطیسی یا ابررساناها می توانند به طور پیوسته معلق شوند. اجسام فرومغناطیسی (Ferromagnetic) فقط در محیطی با نفوذپذیری مغناطیسی بالاتر (مثلاً در یک سیال فرومغناطیسی) می توانند به طور پیوسته معلق شوند.
یاتاقان های مغناطیسی غیرفعال وقتی با محدود کننده های تغییرات دما و عناصر دمپینگ اضافی ترکیب شوند، می توانند عملکرد بسیار خوبی داشته باشند. اینها به کاهش ارتعاشات و اختلالاتی که می تواند باعث بی ثباتی و عدم تعادل شفت چرخان شود کمک می کند. با این حال، یاتاقان های آهنربای دائمی نسبت به یاتاقان های آهنربای فعال ترجیح داده نمی شوند و به طور کلی کارآمدی پایینتری دارند.
یاتاقان مغناطیسی فعال (Active)
یاتاقان مغناطیسی فعال یک دستگاه الکترومکانیکی کنترل شده است. موقعیت پایدار روتور نتیجه عمل نیروهای جاذبه مغناطیسی است. یاتاقان مغناطیسی فعال تضمین می کند که روتور در یک موقعیت خاص در جهت شعاعی یا محوری با استفاده از میدان های الکترومغناطیسی نگه داشته می شود. میدان های الکترومغناطیسی نیز به نوبه خود توسط آهنرباهای الکتریکی کنترل شده تولید می شوند. این آهنرباهای الکتریکی بر روی استاتور یاتاقان قرار دارند. جریان هایی که به سیم پیچ های این آهنرباهای الکتریکی اعمال می شود، بسته به موقعیت روتور در فضا، مطابق با قانون کنترل داده شده، متفاوت است. بنابراین، علاوه بر آهنرباهای الکتریکی، سیستم کنترل شامل سنسورهای موقعیت (و همچنین سنسورهای سرعت چرخشی) است که سیگنال های خطا را تولید می کنند. سیگنال های خطا از طریق تقویت کننده ها، جریان های الکترومغناطیس را کنترل می کنند تا روتور به موقعیت نامی (مرکز) برگردد. قوانین کنترلی که در سیستم کنترل برنامه ریزی شده اند، مشخصه های یاتاقان مغناطیسی فعال را تعیین می کنند.
بلبرینگ های مغناطیسی فعال محبوب ترین نوع یاتاقان های مغناطیسی هستند. این به این دلیل است که کنترل و تنظیم آهنرباهای الکتریکی آسان تر است، بنابراین عملکرد قابل اعتمادتر و قابل پیش بینی تر است. برای کمک به عملکرد کلی، یاتاقان های مغناطیسی فعال دارای سنسورهای فاصله (gap) و چرخش هستند. بنابراین فاصله شفت چرخان تا لبه داخلی بلبرینگ تشخیص داده می شود. با این کار اقدامات اصلاحی مداخله ای مانند افزایش یا کاهش توان الکتریکی در یک عنصر مغناطیسی خاص را می توان به طور خودکار از طریق کنترل کننده اصلی که امروزه معمولاً یک ریزپردازنده است انجام داد.
آینده ی تکنولوژی یاتاقان های مغناطیسی
در حال حاضر، یاتاقان های مغناطیسی فعال برای کسانی که به این نوع بلبرینگ نیاز دارند، انتخابی است. شرکت معتبر SKF در چهار دهه گذشته یاتاقان های مغناطیسی فعال را تولید و توسعه داده است. شرکتهایی مانند NSK، Waukesha، AST، FAG و RBC با نوآوریهای R&D خود، پیشرفتهای پیشرو در این زمینه هستند.
با این حال، به نظر می رسد آینده به سمت یاتاقان های غیرفعال برمی گردد. پیشرفتهای جدید در زمینه یاتاقانهای الکترودینامیکی همقطبی توانستهاند با موفقیت مسائل مورد تجزیه و تحلیل در قضیه ارنشاو را دور بزنند – در حالی که هنوز از هیچ نوع کنترلکنندهای برای کار استفاده نمیشود. این نوع یاتاقان دینامیکی قادر است شفت دوار را با بهره گیری از حرکت چرخشی برای ایجاد نیروهای تثبیت کننده و بازیابی موقعیت تثبیت کند. این کار به طور کامل از تلفات جریان گردابی جلوگیری می کند و باعث می شود از هر چیزی که در حال حاضر موجود است، از لحاظ انرژی کارآمدتر باشد.
سایت کافه مکانیک






هیچ دیدگاهی نوشته نشده است.